یکی از قطعات اصلی در سیستم های الکترومغناطیسی چون الکتروموتور، ژنراتور و آلترناتور ها، روتور است. این وسیله که در انواع موتور های AC و DC استفاده می شود، در بخش های مختلفی قابل بررسی است. مطالبی مانند: روتور چیست؟ وظیفه روتور، شکل یا ساختمان روتور و انواع روتور از جمله مواردی است که در رابطه با روتور می توان به آن پرداخت.

روتور قطعه ای متحرک در ساختمان موتور های AC که در بخش ثابت (غیر فعال) موتور، یعنی استاتور، قرار دارد. روتور که از واژه (rotation/rotate) گرفته شده یکی از اجزا اصلی در موتور های جریان متناوب (AC) است. به عبارت دیگر هیچ موتور AC را نمی توان یافت که فاقد روتور باشد.
این قطعه با قرار گرفتن روی شفت استاتور، داخل یک استوانه توخالی با قطب الکترومغناطیسی ناهنمام چرخیده و منجر به ایجاد میدان مغناطیسی می شود.
برای درک اولیه کارکد آن ها ئدر یک موتور الکتریکی تنها به معنای این کلمات دقت کنید:
- روتور(rotating) به معنای چرخان
- استاتور(stationary) به معنای ساکن
اجزای تشکیل دهنده در موتورهای الکتریکی کدام است؟
این موتورها که در حقیقت محرکهای اصلی در چرخاندن چرخ صنایع هستند دارای بخشهای متنوع و مختلفی هستند که هر یک از این اجزا در کنار دیگری وظیفهای مشخص و مربوط به خود دارد. این اجزا در موتورهای الکتریکی شامل:
1- استاتور و روتور
2- شکاف هوایی
3- سیم پیچ
4- منبع تغذیه
5- آرمیچر
6- آهن ربا

¦
وظیفه روتور
وظیفه روتور در موتور های جریان متناوب، ایجاد میدان مغناطیسی و در نتیجه به حرکت در آوردن لوازمی چون ماشین لباسشویی، آسانسور و… می شود.
·
اجزا روتور (شکل روتور)
ساختمان روتور به صورتی طراحی شده است که با اتصال و قرار گیری به شفت استاتور امکان چرخیدن روتور را فراهم می کند. بخش های مهم در اجزا تشکیل دهنده روتور به صورت زیر است:
- چنگگ روی روتور
- سیم پیج داخل روتور
- کلکتور های مثبت و منفی
- فن (fan)


طریقه کار روتور
کلکتور های مثبت و منفی در روتور به زغال های مثبت و منفی در استاتور متصل می شود و به این وسیله جریان برق به کلکتور ها می رسد.
دو سر سیم پیچ های روتور به دو کلکتور متصل هستند. زمانی که جریان برق مثبت از زغال مثبت به یک سر سیم پیچ می رسد و جریان برق منفی از کلکتور دیگر به سر دیگر سیم پیچ انتقال می یابد؛ داخل سیم پیچ جریان مثبت و منفی ایجاد شده و در نتیجه میدان مغناطیسی در آن به وجود می آید.
به محض تشکیل میدان مغناطیسی در سیم پیچ، چنگگ های اطراف آن یک در میان به قطب های N و S تبدیل شده و باعث تشکیل آهن ربا می شود.
در این زمان که میدان مغناطیسی و حرکت موتور موجب ایجاد حرارت و داغی در سیم پیچ و روتور می شود، فن موجود دور روتور از بالا رفتن حرارت جلوگیری می کند.
روتور (rotor) یک قطعه متحرک از یک سیستم الکترومغناطیسی در موتور الکتریکی (electric motor)، ژنراتور الکتریکی (electric generator) و یا آلترناتور (alternator) است. چرخش روتور به دلیل تعامل بین سیمپیچها و میدانهای مغناطیسی است که در اطراف محور روتور تولید گشتاور میکنند.
¦
نوع و ساختمان روتورها
↓
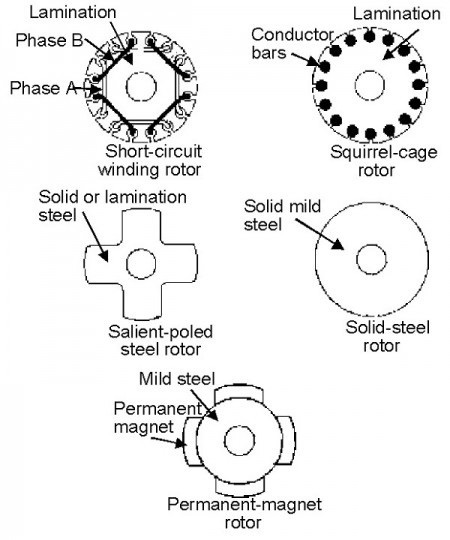
موتورهای القایی (induction motors) یا موتورهای آسنکرون (asynchronous motors)، ژنراتورها (generators) و آلترناتورها (alternators) دارای یک سیستم الکترومغناطیسی متشکل از یک استاتور (stator) و روتور هستند. دو طرح برای روتور در یک موتور القایی وجود دارد:
روتور قفس سنجابی (squirrel cage rotor)

·
روتور سیم پیچی (wound rotor)
↓

·
در ژنراتورها و آلترناتورها، طرح روتورها به صورتهای زیر است:
↓
قطب برجسته (salient pole rotor)
↓
روتور استوانهای (cylindrical rotor)

·
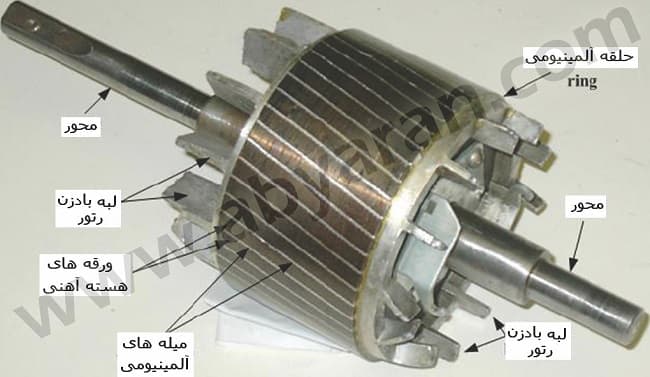
روتور قفس سنجابی
↓
روتور قفس سنجابی (squirrel-cage rotor) از فولاد لایهلایه در هسته تشکیل شده است که تسمههای مسی یا آلومینیومی به صورت محوری با فاصله برابر حول محیط آن قرار گرفتهاند و انتهای آنها توسط رینگهای انتهایی به صورت دایم اتصال کوتاه شده است. این ساختار ساده و ماهرانه، روتورهای قفس سنجابی را برای بسیاری از کاربردها مورد علاقه میسازد.

مزایای موتور آسنکرون با روتور قفسه ای :
1- راه اندازی موتور آسنکرون با روتور قفسه ای بر خلاف موتور سنکرون خیلی ساده میباشد یعنی نه به موتور فرعی و نه به جریان دائم که در موتورهای سنکرون مورد احتیاج بود ، احتیاج دارد.
2- ساختمان این موتور ساده است .
3- امکان افزایش بار در آنها زیاد است .
4- سرعت آن در بارهای مختلف تقریباً ثابت است .
5- ضریب قدرت بهتری نسبت به موتور آسنکرون با روتور سیم پیچی شده دارد .
معایب موتور آسنکرون با روتور قفسه ای :
1- در موقع شروع به کار جریان زیادی از شبکه میگیرد .
2- گشتاور شروع به کار آن کم میباشد .
3- در موقعیکه بار آن به حد کافی نیست ضریب قدرتش کم است .
4- در مقابل تغییر فشار الکتریکی حساسیت دارد .
5- تنظیم تعداد دور آنها مشکل می باشد .
′
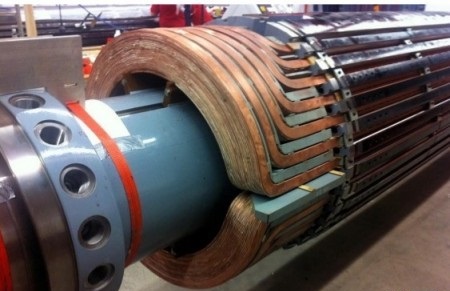
روتور کلافی
↓
روتور کلافی (wound rotor) یا روتور سیم پیچی، یک هسته استوانهای ساخته شده از ورقه لایهای و دارای شیارهایی برای نگه داشتن سیمهای سیمپیچ ۳ فاز آن است که به طور مساوی در ۱۲۰ درجه الکتریکی از یکدیگر جدا و در یک پیکربندی 'Y' به هم متصل میشوند. روتورهای کلافی بر روی شافت روتور به سه رینگ لغزشی (slip ring) دارای جاروبک (brush) متصل میشوند. برای کنترل سرعت، جاروبکهای روی رینگ لغزشی به مقاومتهای سه فاز خارجی اجازه اتصال سری به سیمپیچهای روتور را میدهند. در زمان استارت موتور برای تولید یک گشتاور بزرگ، مقاومت خارجی تبدیل به بخشی از مدار روتور میشود. با سرعت گرفتن موتور، مقاومت به صفر کاهش مییابد.

‚
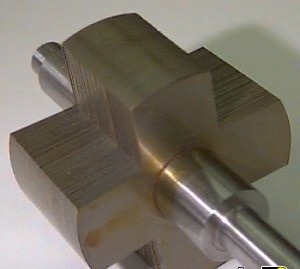
روتور با قطب برجسته
↓

روتور یک آهنربای بزرگ با قطبهای ساخته شده از ورقههای فولادی است که از هسته روتور بیرون زدهاند. قطبها توسط جریان مستقیم تغذیه و یا توسط آهنرباهای دایمی مغناطیسی میشوند. آرمیچر با سیمپیچ سه فاز به سه رینگ لغزشی متصل و بر روی شافت نصب میشود. جاروبکها بر رینگهای لغزشی حرکت میکنند. سیمپیچی که روی روتور پیچیده میشود میدان مغناطیسی تولید میکند و در سیمپیچ آرمیچر که بر روی استاتور است، ولتاژ القا میشود. جریان مستقیم (DC)، از یک محرک خارجی و یا از یک پل دیود نصب شده بر روی شافت روتور، یک میدان مغناطیسی تولید میکند و سیمپیچهای دوار میدان را تغذیه میکنند و جریان متناوب به صورت همزمان سیمپیچ آرمیچر را انرژیدار میکند.

•
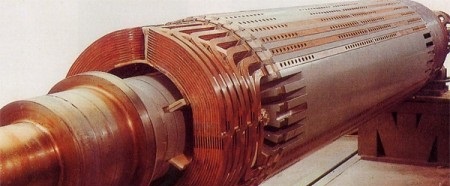
روتور استوانهای
↓
روتور استوانهای شکل از یک محور فولادی توپر دارای شیارهایی که در امتداد طول خارجی استوانه برای نگه داشتن سیمپیچ میدان روتور تشکیل شده است. سیمپیچ میدان روتور به صورت تسمههای مسی لایهای است که در داخل شیارها قرار میگیرند و به وسیله بالههایی نگه داشته میشوند. شیارها نسبت به سیمپیچ عایق شدهاند و به وسیله رینگهای لغزشی از انتها نگه داشته میشوند. یک منبع جریان مستقیم (DC) خارجی به رینگهای لغزشی دارای جاروبک متصل میشود. جاروبکها با رینگهای لغزشی دوار ایجاد یک اتصال الکتریکی میکنند. جریان DC همچنین میتواند از طریق تحریک بدون جاروبک از یک یکسوساز نصب شده بر روی شافت ماشین تامین شود که جریان متناوب را به جریان مستقیم تبدیل میکند.

ویژگیهای انواع روتورها
↓
روتور قفس سنجابی
♦
سرعتی کمتر از چرخش میدان مغناطیسی استاتور یا سرعت سنکرون میچرخد
لغزش روتور، جریانهای القایی لازم روتور را برای گشتاور موتور ایجاد میکند که متناسب است با میزان لغزش
زمانی که سرعت روتور افزایش مییابد، لغزش کاهش مییابد
افزایش لغزش باعث افزایش جریان موتور میشود که به نوبه خود باعث افزایش جریان روتور میشود که نتیجه آن گشتاور بالاتر برای تامین افزایش بار است
¦
روتور سیمپیچی
↓
روتور با سرعت ثابت کار میکند و دارای جریان راهاندازی پایینتری است
مقاومت خارجی به مدار روتور اضافه میشود و گشتاور راهاندازی را افزایش میدهد
در زمان افزایش سرعت موتور کارایی موتور با کاهش مقاومت خارجی بهبود مییابد
کنترل بهتری بر سرعت و گشتاور اعمال میکند
·
روتور با قطب برجسته
↓
بدون تحریک شدن در سرعتهای زیر ۱۵۰۰ دور در دقیقه و در ۴۰ درصد گشتاور خود کار میکند
دارای قطر بزرگ و طول محوری کوتاه است
فاصله هوایی غیر یکنواخت است
روتور دارای استحکام مکانیکی پایین است
·
روتور استوانهای
↓
روتور در سرعت بین ۱۵۰۰ تا ۳۰۰۰ دور در دقیقه کار میکند
دارای استحکام مکانیکی قوی است
فاصله هوایی یکنواخت است
قطر آن کوچک و دارای طول محوری بزرگ است و نسبت به روتور با قطب برجسته نیاز به تورک بالاتری دارد