





نوعی ماشین که انرژی الکتریکی را به انرژی مکانیکی تبدیل می کند. امروزه تقریبا تمامی شرکتهای تجاری و صنعتی مدرن، استفاده از درایور های الکتریکی را به درایور مکانیکی ترجیح می دهند زیرا دارای مزایای زیر هستند:
- ساخت آسان و هزینه نگهداری کمتر
- کنترل سرعت آسان و روان
- عمر نسبتاً طولانی تر
- مرتب، تمیز و عاری از هرگونه دود یا دودکش
- می توان آنها را در هر مکان مناسب و دلخواه نصب کرد، بنابراین انعطاف طرح را بالا می برند.
- می توان آنها را از راه دور کنترل کرد.
- جمع و جور بودن، فضای کمتری میخواهند.
- می توان بلافاصله بدون هیچ گونه اتلاف وقت شروع به کار کنند.
با این حال، سیستم های محرک الکتریکی دارای معایب ذاتی زیر است:
- به محض خرابی در تأمین برق متوقف می شوند.
- نمی توان از آنها در مکانهای دور که از با منبع برق تأمین نمیشود استفاده کرد.
با وجود این موارد می توان با نصب ژنراتورهای دی سی دیزل و دینام های 3 فاز توربین محور، که در هنگام عدم تأمین برق استفاده شوند، معایب فوق را برطرف کرد. برای موتورهای الکتریکی دسته بندی های متفاوتی وجود دارد. یک نوع دسته بندی که بر اساس برق مصرفی است به دو دسته جریان مستقیم (DC) و جریان متناوب (AC) تقسیم بندی میشود.
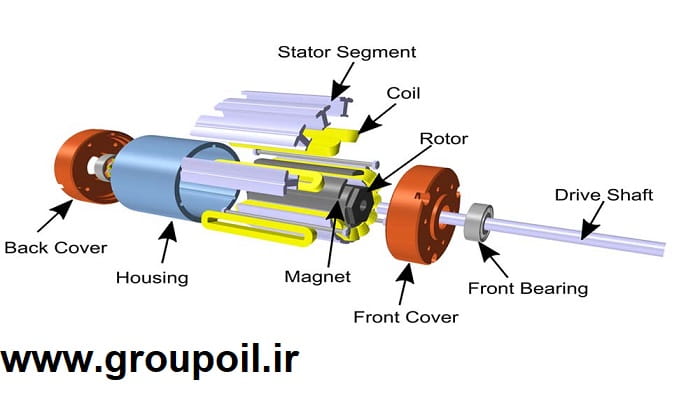
بررسی اجزا موتورهای الکتریکی
اجزای کلی استفاده شده در این موتورها عبارتند از:
- محفظه (موتورهای الکتریکی AC و DC)
- استاتور (موتورهای الکتریکی AC و DC)
- روتور ( موتورهای الکتریکی AC و DC)
- یاتاقان (فقط برای موتورهای الکتریکی AC)
- کموتاتور( فقط برای موتورهای الکتریکی DC)
- برس (فقط برای موتورهای الکتریکی DC)
- جعبه (موتورهای الکتریکی AC و DC)
- پیچ و مهره (موتورهای الکتریکی AC وDC)
این ساختار اساسی تمام موتورها است، اما تفاوتهای جزئی به نوع موتور بستگی دارد. در ادامه به بررسی هر یک از این موتورهای جریان مستقیم (DC) و جریان متناوب (AC) خواهیم پرداخت.

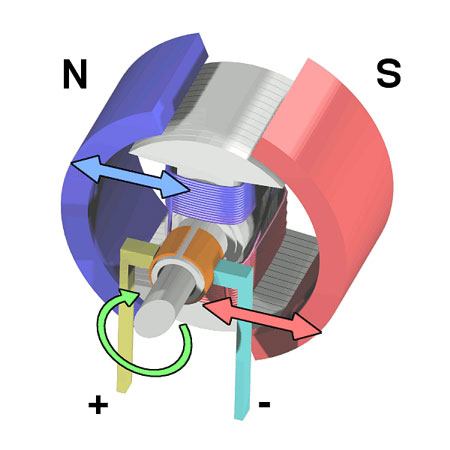
الکتروموتور دارای اجزای متعدد و گوناگونی هستند، که در اینجا می خواهیم، بخش های مهم آن را معرفی کنیم …
- سوئیچ جهت برق
- آهن ربا
- ذغال منتقل کننده
- محور یا مرکز
- منشا غنی برق DC
- آرمیچر موتور الکتریکی
نحوه انتخاب الکتروموتور
اولین نکته ای که در انتخاب یک الکتروموتور باید در نظر گرفته شود تکفاز یا سه فاز بودن ولتاژ برق محل نصب می باشد. الکتروموتورها بر اساس توان و دور و نحوه نصب انتخاب می شوند. در صورتیکه توان الکتروموتور مشخص نباشد، می توان با در نظر گرفتن گشتاور خروجی مورد نیاز، توان را مشخص نمود. توان الکتروموتور بر حسب کیلووات و گشتاور آن بر حسب نیوتن متر بیان می شود. دور الکتروموتور با توجه به دور نهایی دستگاه متحرک انتخاب می شود و معمولا 900، 1400 یا 2900 دور در دقیقه می باشد. الکتروموتورها را می توان بر روی پایه نصب کرد. در صورتیکه الکتروموتور به صورت مستقیم به گیربکس یا هیدروموتور کوپل شود، باید در خروجی دارای فلنج باشد. فلنج می تواند با توجه به نیاز مشتری به صورت کوچک (B14) یا بزرگ (B5) تولید شود. باید توجه داشت که پوسته الکتروموتورها از جنس چدن یا آلومینیوم می باشد که با توجه به شرایط کاری و وزن مورد نیاز و میزان لرزش دستگاه انتخاب می شود.
تعاریف و اصطلاحات الکتریک
جریان
نسبت تغییرات بار الکتریکی (q) به زمان (t) را جریان و واحد آن آمپر (A) است و به وسیله دستگاه آمپرمتر که به صورت سری در مدار نصب می شود اندازه گیری می شود.
اختلاف پتانسیل
اختلاف پتانسیل یا ولتاژ کمیتی است که باعث جاری شدن جریان در یک مدار بسته می شود و واحد آن ولت (V) و توسط ولت متر که بصورت موازی در مدار بسته می شود اندازه گیری می شود.
واحد کار الکتریکی و واحد توان ظاهری
واحد کار الکتریکی وات بر ثانیه (W/S) و واحد توان ظاهری ولت آمپر (VA) یا کیلو ولت آمپر یا مگاولت آمپر می باشد.
جریان نامی
جریانی که یک دستگاه برقی مانند موتور الکتریکی در شرایط مشخص شده، می تواند از خود عبور دهد، بدون آنکه زیاد گرم شود یا تحت تنش های مکانیکی بیش از حد قرار گیرد.
اهم
در صورتی که ولتاژی معادل 1 ولت به دوسر مقاومتی اعمال شود و جریان 1 آمپر از آن عبور کند مقدار مقاومت 1 اهم است. واحد مقاومت الکتریکی اهم (Ω) است.
وات
میزان انرژی تولید شده را برحسب وات بیان می کنند. برای مثال لامپ های روشنایی با میزان وات مشخص می شوند که نشان می دهد این لامپ تا چه مقدار انرژی نورمی تواند بدهد.
آمپر
آمپر مقدار الکتریسیته جاری شده در یک مدار است. در واقع هنگامی که نیرویی موجب حرکت الکترون ها در جهت مخصوصی می شود جریان الکتریکی تولید می شود. جریان (I) را بر حسب آمپر (A) بیان می کنند.
ولت
میزان ولت یا ولتاژ اندازه مقدار الکتریسیته است. در واقع اختلاف پتانسیل الکتریکی بین دو نقطه را گویند. به بیان ساده تر نیرویی که الکترون های آزاد را به حرکت در می آورد ولتاژ الکتریکی نام دارد. اختلاف پتانسیل الکتریکی (R) بر حسب ولت (V) بیان می کنند.
میدان مغناطیسی
میدان الکتریکی در هر نقطه برابر نیروی وارد بر بار آزمون واحد q0 تعریف می شود. به بیان دیگر، برای تعیین میدان الکتریکی E ما مقدار نیرو F را بر بار q0 تقسیم می کنیم.

انواع الکتروموتور (Electromotor)
الکتروموتورها را می توان به سه نوع اصلی تقسیم بندی کرد:
- الکتروموتور جریان مستقیم (Direct Current) یا DC
- الکتروموتور جریان متناوب (Alternating Current) یا AC
- الکتروموتورهای خاص
هریک از موارد ذکرشده بر اساس ویژگی هایشان زیرمجموعه های مجزایی دارند که
در ادامه به توضیح هریک از آن ها می پردازیم.

1- انواع الکتروموتور DC
الکتروموتورهای DC جزء ابتدایی ترین انواع الکتروموتور هستند.
همان گونه که از اسمشان مشخص است تنها با جریان مستقیم (DC) کار می کنند.
این نوع الکتروموتور آرمیچر آهنربایی و کموتاتور دارد که
باعث تغییر مسیر جریان به طور منظم و ایجاد میدان مغناطیسی می شود.
در ادامه به چند مورد از انواع الکتروموتور DC اشاره می کنیم:
1) الکتروموتور DC سری (Series)
این نوع الکتروموتور هنگام راه اندازی به گشتاور بالایی نیاز دارد؛
بنابراین قابل استفاده در صنایعی است که امکان فراهم سازی گشتاورهای بالا را دارند.
می توان انواع الکتروموتور موجود در جرثقیل های سنگین و آسانسورهای هیدرولیکی را برای الکترموتور DC سری مثال زد.
لقب این نوع از موتورهای الکتریکی، الکتروموتورهای کششی است؛
زیرا در ساختار وسایل نقلیه عمومی مانند تراموا و مترو به کار می رود.

2) الکتروموتور DC شانت (Shunt)
اجزای داخلی این نوع از الکتروموتورها زیر فشار سنگین آسیب می بینند؛
بنابراین نمی توان آن ها را زیر فشارهای سنگین راه اندازی کرد.
این نوع در دور نامی خود دارای گشتاور حرکتی حداکثر است؛
از این رو در ساختار دمنده های صنعتی و هواکش ها کاربرد دارد.

3) الکتروموتور DC کمپوند (Compound)
اکتروموتورهای کمپوند خصوصیات مشترک الکتروموتورهای شانت و سری را دارند.

الکتروموتور کمپوند به دو زیرمجموعه تقسیم می شود:
-
الکتروموتور کمپوند نقصانی: در برخی از جایگاه ها تنها به بار ثابت کوچک تر از بار نامی نیاز است؛
بنابراین در این موارد از الکتروموتورهای کمپوند نقصانی استفاده می شود؛
مانند آزمایشگاه های تولید بار ثابت با سرعت تقریبا ثابت.

-
الکتروموتورهای کمپوند اضافی: این نوع الکتروموتور در مواردی که الکتروموتور سری نیاز است، کاربرد دارد؛
با این تفاوت که الکتروموتور کمپوند اضافی از دور گرفتن شدید و غیرقابل کنترل جلوگیری می کند.
از همین رو در صنایعی همچون دستگاه های تراشکاری کاربرد دارد.

2- انواع الکتروموتور AC
با رواج استفاده از جریان متناوب (AC)، صنایع بسیاری از این جریان و درنتیجه الکتروموتورهای متناوب بهره می برند.
انواع الکتروموتور AC از قسمت ثابتی به نام استاتور و قسمت متحرکی به نام روتور تشکیل شده اند که
میدان مغناطیسی به وجود آمده باعث تغییر جهت و حرکت روتور می شود.
معمولا انواع الکتروموتور متناوب، ساختار ساده تری دارند؛
بنابراین تعمیر و اصول نگهداری از آن ها نسبت به سایر مدل های الکتروموتور آسان تر است.
از این نوع در بسیاری از صنایع و مصارف خانگی استفاده می شود.
1-2# الکتروموتور AC سنکرون (Synchronous)
این نوع الکتروموتور، روتور و استاتور سیم پیچی شده دارد.
روتور توسط جریان مستقیم و استاتور توسط جریان متناوب تغذیه و باعث به وجود آمدن میدان چرخشی می شوند.
روتور با سرعت سنکرون ایجاد شده توسط میدان دوار به حرکت در می آید.
2-2# انواع الکتروموتور AC آسنکرون (Asynchronous)
این نوع الکتروموتور نیز مانند سایر موتورها قسمت ثابت (استاتور) و قسمت متحرک (روتور) دارد.
روتور این دستگاه توسط میدان مغناطیسی تولیدشده توسط استاتور به حرکت در می آید.

مزایای الکتروموتور سنکرون
- در مقابل نوسان ولتاژ حساسیت ندارد.
- بازده بسیار بالایی دارد.
- دارای ضریب قدرت مناسب و قابل تنظیم است.
- این الکتروموتور می تواند بطور مستقیم با ولتاژ زیاد کار کند.
نقاط ضعف الکتروموتور سنکرون
- سرعت این الکتروموتور ثابت است و قابلیت تنظیم برای سرعت های بالاتر و یا پایین تر را ندارد.
- این الکتروموتور قابلیت تحمل بار اضافه را ندارد.
- علاوه بر جریان متناوب برای سیم پیچ استاتور، جریان دائم برای قطب های این موتور الکتریکی نیز مورد نیاز است در نتیجه قیمت این الکتروموتور را نسبت به موارد مشابه خود بالاتر می برد.
- به یک وسیله راه انداز اولیه که می تواند موتور کمکی باشد احتیاج دارد.
انواع الکتروموتور آسنکرون عبارت اند از:
-
الکتروموتور آسنکرون قفس سنجابی: نام این الکتروموتور به دلیل تشابه بسیار بالای روتور آن به شکل قفس سنجاب ها است.
روتور این الکتروموتور به صورت استوانه با میله های مسی و آلومینیومی است،
میله ها به دو صورت میله های گرد و میله های مستطیلی به شکل مورب کنار هم قرار می گیرند.
دلیل مورب قرار گرفتن میله ها، استفاده از هم پوشانی میدان استاتور و روتور برای جلوگیری از قفل شدن و ایجاد لرزش در هنگام راه اندازی است.
-
الکتروموتور آسنکرون روتور سیم پیچی شده: برای رفع نقطه ضعف الکتروموتورهای قفس سنجابی مقاومت پایین، از الکتروموتورهای سیم پیچی استفاده می شود.
به این صورت که به جای استفاده از میله ها از روتور سیم پیچی شده استفاده می شود که
در لحظه راه اندازی مانع بالا رفتن جریان و گشتاور می شود.
همچنین در این نوع الکتروموتور با قرار دادن مقاومت در مسیر سیم پیچ ها می توان کنترل جریان الکتروموتور را به دست گرفت.

انواع الکتروموتور تک فاز
انواع دینام تک فاز عبارتند از:
- الکتروموتور تک فاز AC با فاز شکسته
- الکتروموتور تک فاز AC با استارت خازنی
- الکتروموتور تک فاز AC با خازن دائمی اسپیلت
الکتروموتور تک فاز AC با فاز شکسته
این نوع از موتور تک فاز دو پیچه دارند. در پیچه استارت این دینام، سیم نازک تر و تعداد دور کمتر نسبت به پیچه اصلی برای بوجود آوردن مقاومت بیشتر ساخته می شود. پیچه استارت در زاویه ای متفاوت با پیچه اصلی دارد قرار دارد تا سبب آغاز چرخش محور الکتروموتور شود. پیچه اصلی از سیم ضخیم تری ساخته شده است. این الکتروموتور مناسب کارهایی با گشتاور راه اندازی کم و توان مورد نیاز ۱/۲۰ تا ⅓ اسب بخار می باشد و این الکتروموتورها در کاربری هایی که نیاز به روشن و خاموش کردن های پیاپی و یا نیاز به گشتاور زیاد دارند مناسب نیست.
الکتروموتور تک فاز AC با استارت خازنی
این نوع همان مدل اصلاح شده فاز شکسته با خازن سری برای بهبود استارت است و به دلیل ضماخمت بالاتر سیم در مدار استارت گشتاور راه اندازی بالاتری دارند.
الکتروموتور با استارت مقاومتی
نوع ارتقاء یافته الکتروموتور استارت خازنی نیز الکتروموتور با استارت مقاومتی است که در آن، خازن استارت با یک مقاومت جایگزین شده است. موتور الکتریکی با استارت مقاومتی در کاربری هایی مورد استفاده قرار می گیرد که میزان گشتاور استارت، کمتر از مقداری که الکتروموتور با استارت خازنی تولید می کند لازم است. صرف نظر از هزینه، این الکتروموتور صنعتی امتیازات عمده ای نسبت به موتور الکتریکی با استارت خازنی ندارد. این موتورها در انواع مختلف کاربری های پولی و تسمهای مانند تسمه نقاله های کوچک و در پمپ ها، دمنده های بزرگ و کاربری های چرخ دنده ای به خوبی استفاده می شوند.
الکتروموتور تک فاز AC با خازن دائمی اسپلیت
این نوع از موتور الکتریکی نوعی خازن دارد که به طور دائمی و بصورت سری به پیچه استارت متصل است. این کار سبب آن می شود که پیچه استارت تا زمانی که محور الکتروموتور به سرعت چرخش نامی خود برسد به صورت پیچهای کمکی عمل کند. از آنجا که خازن عملکرد اصلی، باید برای استفاده مداوم طراحی شده باشد، نمیتواند توان استارتی معادل یک الکتروموتور استارت خازنی ایجاد نماید. گشتاور استارت یک الکتروموتور تک فاز با خازن دائمی معمولا کم و در حدود ۳۰ تا ۱۵۰ درصد گشتاور نامی است.
الکتروموتور تک فاز AC استارت با خازن/کارکرد با خازن
این نوع، همانند موتور با استارت خازنی، خازنی از نوع استارتی در حالت سری با پیچه کمکی برای گشتاور زیاد استارت دارد. همچنین مانند یک الکتروموتور با خازن دائمی، خازنی از نوع کارکرد دائم دارد که در کنار خازن استارت در حالت سری با پیچه کمکی است که بعد از شروع به کار الکتروموتور از مدار خارج می شود. این حالت سبب بوجود آمدن گشتاوری اضافی می شود. این نوع موتور الکتریکی میتواند برای بازده بیشتر طراحی شود.
الکتروموتور تک فاز AC با قطب سایه دار (با حلقه اتصال کوتاه)
انواع الکتروموتور تک فاز با قطب سایه دار فقط یک پیچه یا کلاف اصلی دارند و پیچه یا کلاف راه انداز ندارند. استارت خوردن به وسیله طرح خاص آن که حلقه پیوسته مسی ای را دور قسمت کوچکی از هر قطب موتور الکتریکی حلقه می کند انجام می شود. این سایه که قطب را دو تکه می کند سبب می شود که میدان مغناطیسی ای ضعیف تر در ناحیه سایه خورده نسبت به قسمت دیگر و در کنار آن بوجود آید. تعامل میان میدان ها محور را به چرخش وا می دارد.
مزایای موتورهای سه فاز آسنکرون
١- دارای ساختمان بسیار ساده و فوق العاده محکم هستند.
۲- قیمت نسبتاً ارزانی نسبت به موتورهای مشابه دارند و قابل اعتماد هستند.
٣- بازده بالایی دارند ؛ یا به عبارت دیگر، راندمان آنها بالاست.
۴- ضریب قدرت نسبتاً خوبی دارند.
۵- در شرایط کار نرمال به حداقل تعمیر نیاز دارند.
۶- احتیاج به موتور راه انداز ندارند، در حالی که موتورهای سنکرون نیاز به یک موتور محرک دارند و راه اندازی موتورهای آسنکرون بسیار ساده است.
۷- نسبت به موتورهای مشابه، در حجم کمتر و با قدرت بیشتر ساخته می شوند.
معایب موتورهای سه فاز آسنکرون
١- بدون از دست دادن قسمتی از ضریب بهره، سرعت آن ها قابل تغییر نخواهد بود.
۲- با افزایش بار، سرعت آن ها کم می شود.
٣- کنترل دور آن ها بسیار مشکل بوده، با تغییرات جزئی فرکانس، دور آن ها کم و زیاد می شود.
۴- موتور AC آسنکرون نمی تواند فرکانس ثابت تحویل دهد.
لغزش موتور آسنکرون
در ماشین های القایی سرعت حرکت موتور با سرعت حوزه دوار اختلاف دارد. همیشه دور روتور از دور حوزه دوار کمتر است. همین اختلاف موجب القا جریان در مدار روتور می شود. مقدار این اختلاف سرعت را سرعت لغزش یا بازماندگی گویند.
حتماً باید بین سرعت میدان دوار و سرعت روتور اختلافی وجود داشته باشد؛ در غیر این صورت ولتاژی روی میله های روتور به وجود نخواهد آمد و روتور نمی چرخد. لغزش بستگی به بار موتور دارد و وجودش برای تولید گشتاور ضروری است. اگر بار موتور زیاد شود، سرعت روتور کم می شود و بنابراین لغزش کم می شود. کاهش بار نیز باعث کاهش لغزش می شود.
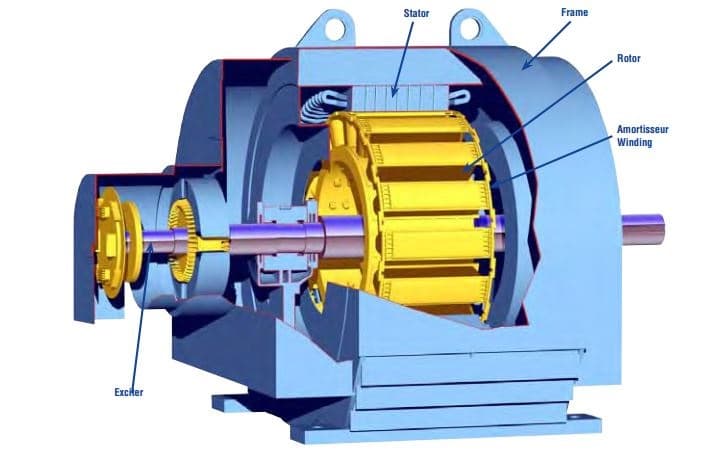
ساختمان موتورهای سه فاز آسنکرون
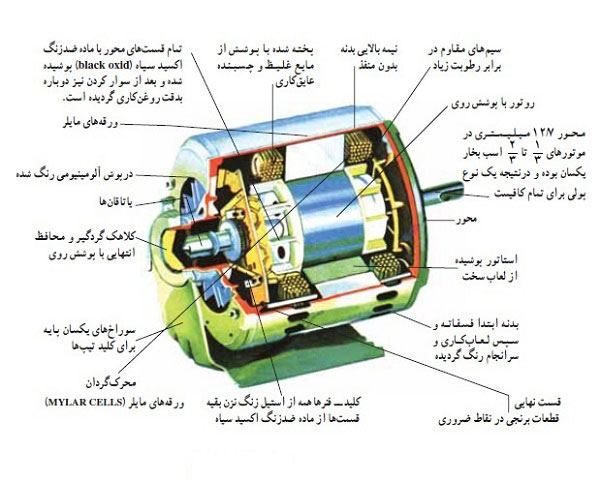
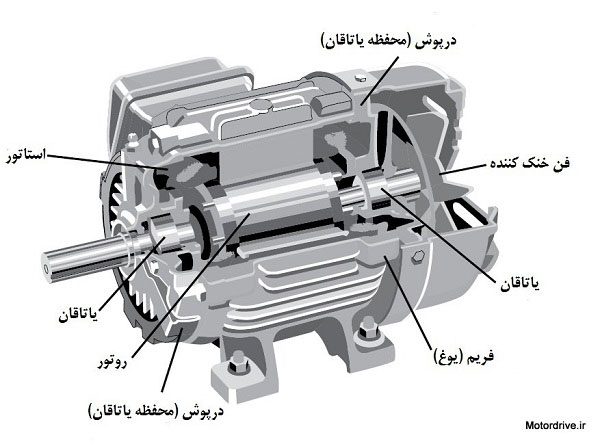
این موتورها از قسمت های زیر تشکیل شده اند:
پوسته با بدنه
جنس آن از چدن است و روی آن شیارهایی جهت تبادل حرارت تعبیه شده است. همچنین، بر روی بدنه تخته کلمپ (جعبه اتصال) و پلاک، مشخصات موتور قرار می گیرد. وظیفه بدنه، نگهداری و حفاظت از سایر قسمت های الکتروموتور است.
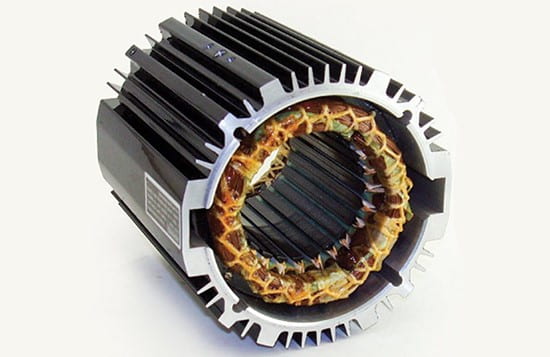
استاتور
قسمت القاء کننده الکتروموتور است که در داخل بدنه یا پوسته قرار می گیرد. استاتور از ورق های دیناموبلش (فولاد سیلیسیم دار) به ضخامت ۰٫۳ تا ۰٫۵ میلی متر تشکیل شده است. این ورق ها نسبت به یکدیگر عایق هستند و وظیفه آن ها متمرکز نمودن میدان مغناطیسی ایجاد شده به وسیله سیم پیچ های استاتور است. همچنین، ورقه ورقه بودن استاتور باعث می شود تا تلفات آهنی الکتروموتور به حداقل برسد. روی ورقه های استاتور، شیارهایی جهت قرار گرفتن سیم پیچ ها داخل آن ایجاد شده است که کلاف های سیم در داخل این شیار ها قرار می گیرند و استاتور یا القاء کننده را تکمیل می نمایند (در داخل شیارهای استاتور سیم پیچی هایی که از سیم های عایق تشکیل شده اند، قرار می گیرد). استاتورها با توجه به نوع موتورها به صورت ۶، ۱۲، ۱۸، ۲۴، ۳۰، ۳۶، ۴۸ شیار و در موارد خاص با شیارهای بالاتر نیز ساخته می شوند. سیم بندی موتورهای آسنکرون ممکن است تک فاز یا سه فاز باشد.
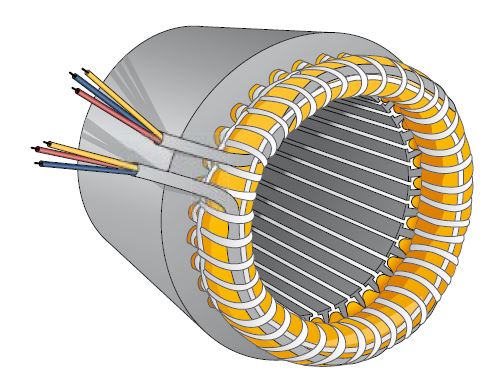
سیم پیچی استاتور موتور آسنکرون
با عبور جریان سه فاز از سه سیم پیچ استاتور ماشین القایی می توان میدان دوار ایجاد کرد به طوری که این میدان پیرامون هسته استاتور گردش کند و بدین ترتیب شرایط لازم برای چرخش رتور را فراهم کند. سیم بندی سه فاز ماشین القایی دوقطبی ساده و اختلاف فاز ۱۲۰ درجه سیم پیچ های سه فاز A و B و C نسبت به یکدیگر در شکل زیر نمایش داده شده است.

در شکل زیر سه دسته کلاف که در محیط استاتور توزیع شده اند نشان داده شده است. دو طرف هر کلاف با یکدیگر ۱۸۰ درجه و هر کلاف با کلاف دیگر ۱۲۰ درجه اختلاف مکان دارد. اگرجریان های سه فاز استاتور دامنه های برابر و اختلاف فاز ۱۲۰ درجه داشته باشند، شار با فرکانسی برابر فرکانس جریان ها شروع به گردش در فاصله هوایی می کند. اگر جریان نیم سیکل را طی کند شار برایند هم نیم دور می زند به عنوان مثال اگر فرکانس منبع تغذیه ۶۰ هرتز باشد سرعت گردش شار ۳۶۰۰ دور در دقیقه خواهد بود.
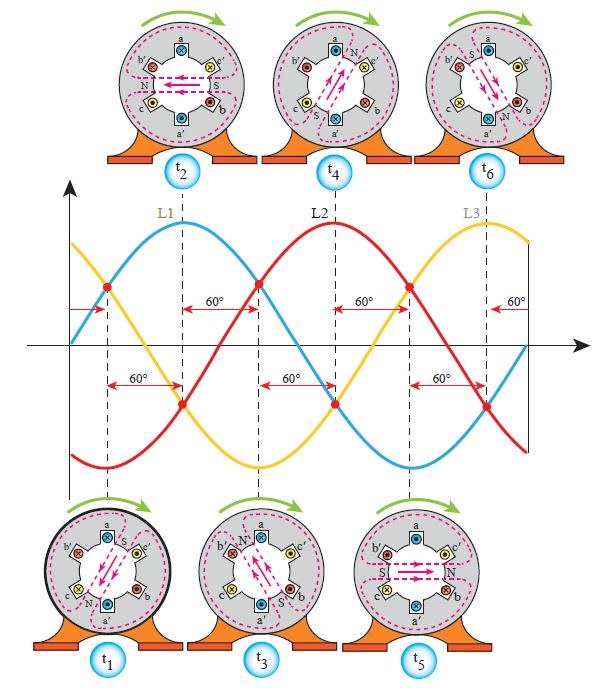
اگر بخواهیم یک استاتور چهار قطب سه فاز به وجود آوریم به شش دسته کلاف احتیاج داریم. دو طرف هر کلاف به جای ۱۸۰،۹۰درجه اختلاف مکان داشته و هر کلاف با کلاف دیگر به جای ۱۲۰ درجه، ۶۰ درجه اختلاف مکان داشته باشد به این ترتیب نیمی از محیط استاتور با سه دسته سیم پیچ پر می شود اگر نیمه دیگر محیط استاتور هم دقیقاً مانند نیمه اول تقسیم بندی شود یک استاتور چهار قطب سه فاز خواهیم داشت.
اکنون اگر جریان ۳۶۰ درجه را طی کند شار فاصله هوایی یک قطب شمال و یک قطب جنوب را طی می کند. بنابراین در یک سیکل کامل جریان آن فقط نیم دور میزند و سرعت گردش شار ۱۸۰۰ دور در دقیقه است. تنها در ماشین دو قطب است که شار از قطر روتور عبور می کند مسیرهای شار برای یک ماشین چهارقطبی در شکل زیر نشان داده شده است.

3- انواع الکتروموتور های خاص
از انواع الکتروموتور AC و DC در جایگاه هایی که نیاز به تبدیل انرژی پیوسته وجود دارد استفاده می کنند؛
اما در برخی از موارد و در کاربردهای خاص نیاز به تولید انرژی دائمی نیست و
الکتروموتور تنها برای کاربردهای ویژه و مخصوص فعالیت انجام می دهد.
به این نوع از الکتروموتورها، الکتروموتور خاص گفته می شود.
بر اساس کارکرد و طراحی، این نوع الکتروموتورها را به چند دسته تقسیم بندی کرده اند.
1-3# الکتروموتور هیسترزیس (Hysteresis)
از انواع الکتروموتور هیسترزیس برای تولید گشتاور بهره می برند.
روتور الکتروموتور هیسترزیس از نوع استوانه صاف بدون هیچ برجستگی و فرورفتگی و حتی بدون هیچ سیم پیچی است.
استاتور این نوع با یک خازن دائمی به کار گرفته می شود تا از تلفات موتور جلوگیری کند.

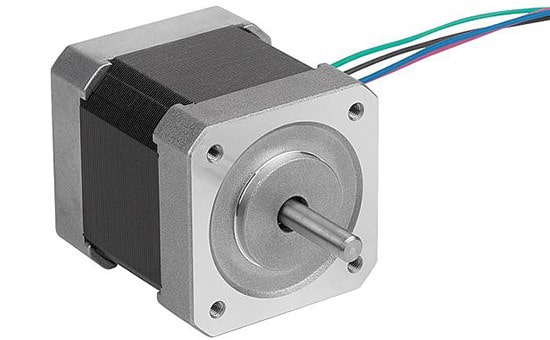
2-3# الکتروموتور پله ای (Stepper)
این نوع الکتروموتور مانند انواع الکتروموتور های موجود روتور و استاتور دارد؛
با این تفاوت که روتور این الکتروموتور دارای دندانه هایی به شکل چرخ دنده است.
روتور به صورت پله ای حرکت می کند و یک دور را معمولا در گام های کوچک (1.8 درجه) می پیماید؛
بنابراین یک دور را در عرض 200 پله طی می کند.
البته این الکتروموتورها بنابر کاربرد و محلی که استفاده می شوند می توانند گام های مختلفی داشته باشند.
سرعت و مکان این نوع الکتروموتورها به وسیله سیستم های پیشرفته تحت کنترل است.
در زمینه روباتیک بیشتر از انواع الکتروموتور پله ای استفاده می کنند.
3-3# الکتروموتور سروو (Servo)
این الکتروموتور در یک مدار بسته مورد استفاده قرار می گیرد.
از سروو موتورها معمولا برای کنترل سرعت، موقعیت، گشتاور و شتاب استفاده می کنند.
این الکتروموتور برخلاف انواع الکتروموتور ذکر شده یک قطعه الکتریکی مجزا با سرعت و دقت بالا و یک سنسور برای فیدبک دادن دارد.

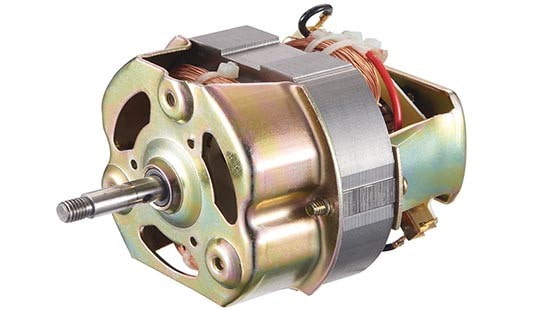
4-3# انواع الکتروموتور یونیورسال (Universal)
این نوع الکتروموتور قابلیت راه اندازی با جریان AC و DC را دارد.
در این نوع موتورها قطب ها چرخشی نیستند و سیم پیچ روتور با سیم پیج قطب ها به صورت سری بسته شده اند.
این نوع الکتروموتورها سرعت بسیار بالا و وزن کم و فشرده ای دارند.
به همین علت انواع الکتروموتور یونیورسال بیشتر در لوازم خانگی مورد استفاده قرار می گیرند.
5-3# انواع الکتروموتور رلوکتانسی (Reluctance)
استاتور این نوع الکتروموتور شیارهایی دارد که سیم پیچی ها روی آن ها قرار می گیرند.
روتور نیز شکل خاصی دارد که در هنگام چرخش به دلیل وجود شیارهای استاتور، در آن فاصله هوایی متغیر ایجاد می شود.
در انواع الکتروموتور رلوکتانسی فاصله هوایی متغیر باعث ایجاد مقاومت مغناطیسی متغیر نیز می شود؛
درواقع در نقاطی که فاصله هوایی بیشتر است، رلوکتانس بیشتر و در مکان هایی که فاصله هوایی کم است رلوکتانس نیز کم می شود.

6-3# الکتروموتور ریپالسیونی (Repulsion)
این نوع الکتروموتورها بر پایه دافعه مغناطیسی کار می کنند.
به صورتی که سیم پیچ استاتورها به جریان متناوب وصل شده و روتور نیز مانند انواع الکتروموتور جریان مستقیم است.
تنها تفاوت بین الکتروموتورهای ریپالسیونی با DC، وجود جاروبک های (brush) اتصال کوتاه شده در محل برخورد جاروبک با کموتاتورها است.

7-3# الکتروموتور دالاندر (Dahlander)
این الکتروموتورها به گونه ای سیم پیچی می شوند که با تغییر در آن ها می توان دو نوع سرعت مختلف را تولید کرد.

به دلیل همین ویژگی استثنایی، از انواع الکتروموتور دالاندر در مدارها به جای اینورترها که قیمت بالایی دارند، استفاده می شود.
نحوه پلاک خوانی الکتروموتور
روی انواع موتورهای الکتریکی، پلاکی توسط کارخانه نصب می گردد که کلیه اطلاعات موتور الکتریکی برای راه اندازی، روی آن آورده می شود و در صورتی که موارد اعلام شده به درستی رعایت نشود موتور الکتریکی می سوزد و یا عمر مفید آن کاهش پیدا می کند.
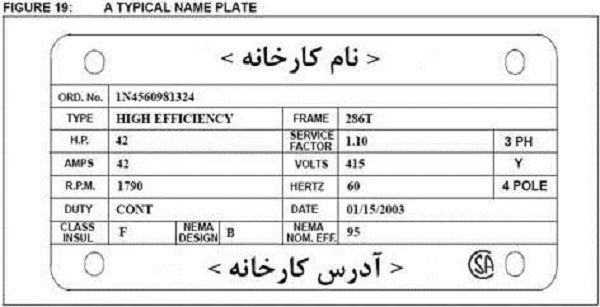
- No: مدل موتور که معمولا توسط کار خانه مشخص می شود.
- Type: نام موتور، با داشتن نام موتور و مراجعه به شرکت سازنده می توانید اطلاعات بیشتری در مورد موتور بدست آورید.
- AMPS: حداکثر جریان مجازی است که موتور برای کار کردن به آن نیاز دارد.
- V: ولتاژ کاری الکتروموتور می باشد که نباید ولتاژ بیشتر و یا کمتر به سیم پیچ های الکتروموتور صنعتی اعمال گردد. در صورت وجود علامت ستاره (Y) یا مثلث (Δ)، ولتاژ در همان اتصال استفاده می شود (مثلا ولتاژ کاری موتور بالا 415 ولت در حالت ستاره است).
- HERTZ: مشخص کننده فرکانس کاری موتور می باشد، معمولا فرکانس کاری موتور ها 50 یا 60 هرتز است.
نکته: دور موتور یک الکتروموتور با فرکانس آن ارتباط دارد. بنابراین الکتروموتوری که فرضا در فرکانس 50 هرتز 1500 دور است، در فرکانس 60 هرتز دیگر دور 1500 ندارد.
- DATE: مشخص کننده تاریخ ساخت موتور است.
- R.P.M: نشان دهنده دور الکتروموتور در یک دقیقه در روی شقت خروجی می باشد.
- KW: مقدار توان الکتروموتور را نشان می دهد.
نکته: اگر روی الکتروموتوری نوشته شده بود 380/220 =V بدین معنی است که این الکتروموتور در شبکه برق 110 ولت که برخی از کشورها استفاده می شود باید بصورت مثلث و در کشورهای که ولتاژ 220 ولت (ولتاژ بین یک فاز و نول) دارند مثل ایران باید بصورت ستاره بسته شود.
- IP= میزان حفاظت الکتروموتور در مقابل گرد و غبار طبق جدول زیر می باشد.
- P.H= انواع حفاظت ها طبق استاندارد دین 40050
- P00= باز بدون حفاظت در مقابل تماس با اجسام خارجی و آب، در این مورد موتور باید در یک فضای سرپوشیده نگه داری شود.
- P10= محفوظ در مقابل تماس دست و اجسام بزرگ خارجی - محافظ در مقابل آب، موتور می تواند در فضای بازو زیر باران کار کند.
- P11= محفوظ در مقابل تماس دست و اجسام بزرگ خارجی - محفوظ در مقابل آب
- P20= محفوظ در مقابل تماس انگشت و اجسام با وزن متوسط بدون حفاظ در مقابل آب، برای موتور باید سرپوش مناسب تهیه شود.
- P21= محفوظ در مقابل تماس انگشت و اجسام با وزن متوسط - ضد آب
- P22= محفوظ در مقابل تماس انگشت و اجسام با وزن متوسط – محفوظ در مقابل ترشح آب به طور عمودی یا مایل با زاویه بیشتر از 30 درجه نسبت به افق
- P30= محفوظ در مقابل تماس با ابزار ها و غیره و اجسام خارجی سبک وزن – بدون محافظت در مقابل آب
- P31= محفوظ در مقابل تماس با ابزار ها و غیره و اجسام خارجی سبک وزن - ضد آب
- P32= محفوظ در مقابل تماس با ابزار ها و غیره و اجسام خارجی سبک وزن - محفوظ در مقابل ترشح آب بطور عمودی یا مایل با زاویه بیشتر از 30 درجه نسبت به افق
- P40 و بالاتر: حفاظت شده در برابر کلیه عوامل خارجی
بر روی انواع موتورهای الکتریکی، اطلاعاتی دیگری نیز ممکن است وجود داشته باشد. کاربر می تواند با مراجعه به کاتالوگ موتور از آنها آگاهی یابد.
استاندارد تعریف شده در رابطه با IP ماشین های الکتریکی
از حرف W پس از دو رقم اعلام شده در مواردی استفاده می شود که ماشین الکتریکی طراحی شده دارای مدار باز با سیستم خنک کننده هوا و در شرایط جوی کار می کند به گونه ای که نفوذ باران و ذرات همراه باد را تحت شرایط معین به داخل ماشین الکتریکی کاهش و کنترل می کند و میزان جزئی وارد شده به داخل در عملکرد آن تاثیری ندارد مانند IP13W.
هرگاه تنها یک مشخصه از شاخص های IP برای مصرف کننده مهم باشد شاخص بی اهمیت با حرف X مشخص می شود مانند IP2X که فقط درجه حفاظت جانی مطرح شده و یا IPX4 که درجه حفاظت در مقابل رطوبت مشخص شده است.
ارقام اول: درجه حفاظت جانی تعریف شده و مشخصات آن
| اولین مشخصه | شرایط عمل |
| 0 | ماشین حفاظت نشده است. |
| 1 | حفاظت شده در مقابل دست انسان و یا اجسام با قطر بیش از 50 میلی متر |
| 2 | حفاظت انجام شده در مقابل انگشتان انسان و یا اجسام با قطر بزرگتر از 12 میلی متر |
| 3 | حفاظت انجام شده در مقابل ابزارهای الکتریکی با قطر بیشتر از 2.5 میلی متر |
| 4 | حفاظت انجام شده در مقابل سیم های نازک و عایق های با قطر بیش از 1 میلی متر |
| 5 | حفاظت انجام شده داخل ماشین الکتریکی در مقابل گرد و غبار بیش از حد که برای آن زیان بار شده است. |
| 6 | حفاظت کامل در مقابل گرد و غبار |
ارقام دوم: درجه حفاظت در مقابل رطوبت تعریف شده و مشخصات آن
| درجه حفاظت | حفاظت انجام شده |
| 0 | ماشین در مقابل رطوبت هیچ حفاظتی ندارد. |
| 1 | موتور الکتریکی در برابر چکیدن آب به صورت قائم حفاظت شده است. |
| 2 | موتور الکتریکی در برابر چکیدن آب با انحراف 15 درجه نسبت به قائم محافظت شده است. |
| 3 | موتور الکتریکی در مقابل ترشح آب محافظت شده است. |
| 4 | موتور الکتریکی در مقابل پاشیدن آب محافظت شده است. |
| 5 | موتور الکتریکی در مقابل خوردن آب محافظت شده است. |
| 6 | موتور الکتریکی در مقابل سیلاب محافظت شده است. |
| 7 | موتور الکتریکی در مقابل اثرات مخرب غوطه وری محافظت شده است. |
| 8 | موتور الکتریکی توانایی قوطه وری دائم در آب را دارا می باشد. |
کلاس عایق حرارتی موتور الکتریکی
با توجه به استانداردهای تعیین شده توسط انجمن بین المللی تولید کنندگان تجهیزات الکتریکی
(NEMA) NATIONAL ELECTRICAL MANUFACTURES ASSOCIATION
عایق بندی موتورهای الکتریکی با توجه به درجه حرارت موتور در محیط های مختلف کاری در چهار کلاس (A, B, F, H) تعریف شده است و بر اساس این استاندارد درجه حرارت محیط 40 درجه سانتی گراد در نظر گرفته می شود و درجه حرارت تعیین شده با یک بازده حداکثر 10 درجه برای گرم ترین نقطه در مرکز پیچی (HOT SPOT) در نظر گرفته می شود.
| استاندارد (سانتی گراد) | کلاس عایق |
| 105C | A |
| 130C | B |
| 155C | F |
| 180C | H |
برندهای قابل فروش انواع دینام در فامکو
| برندهای الکتروموتور TEFC | |
| زیمنس | موتوژن |
| WEG | جمکو |
| ABB | Marelli |
| الکتروموتور VEM | الکتروموتور الکتروژن |
| الکتروموتور Stream | الکتروموتور ATB |
| Kaijieli | |
| برندهای الکتروموتور ضد انفجار (EX) | |
| زیمنس | ABB |
| ATB | WEG |
| چمپ | Marelli |
عوامل آسیب رسان به انواع موتورهای الکتریکی
- خرابی بلبرینگ ها
- گرم شدن سیم بندی موتور
- اضافه بار
- جریان های موتور در شرایط راه اندازی
- توقف موتور
- عدم تقارن ولتاژ تغذیه
توقف موتور و عدم تقارن ولتاژ تغذیه معمولاً به دلیل قطع یک خط از تغذیه سه فاز رخ می دهد.
روش های حفاظت از انواع موتورهای الکتریکی
موتورهای الکتریکی از هر نوعی که باشند باید نسبت به حالت های مضر در موتور مقاوم باشند. از حالت های مضر در موتور می توان به اضافه بار در موتور، اتصال کوتاه، افت و افزایش ولتاژ، ولتاژ نامتعادل و تک فاز شدن موتور اشاره کرد. برای حفاظت موتورهای الکتریکی در مدار به ترتیب از تجهیزات زیر استفاده می شود:
۱- کلید جدا کننده زیر بار مثل کلید گردان
۲- جهت حفاظت اتصال کوتاه نیز از فیوز استفاده می شود که این فیوز بر اساس جریان نامی موتور طراحی می شود و به روش راه اندازی موتور الکتریکی بستگی ندارد. ( می توان کلید-فیوز را جای گزین کلید گردان و فیوز نمود.)
۳- کنتاکتور جهت قطع و وصل و کنترل موتور
کاهش ولتاژ باعث می شود که موتورها به سرعت نامی خود نمی رسند و یا سرعت خود را از دست می دهند و این امر موجب اعمال اضافه بارهای سنگینی به موتور می شود. کنتاکتورهای AC موجب فراهم آمدن حفاظت خوبی در مقابل کاهش ولتاژ می شوند

.
۴- از رله حرارتی که به کنتاکتور وصل می شود، به منظور حفاظت در برابر اضافه بار استفاده می شود.
۵- رله کنترل فاز: رله کنترل فاز انواع مختلفی دارد که می تواند عدم تقارن و توالی فاز، افت و افزایش ولتاژ و قطع فاز را تشخیص دهد و فرمان قطع مدار را صادر کند.

از کلیدهای پرکاربرد در تابلو برق به منظور محافظت موتور در برابر اضافه بار و اتصال کوتاه، کلید محافظ موتور MPCB (Motor Protection Circuit Breaker) است که جای گزین کلید جداکننده زیر بار، فیوز و رله حرارتی در مدار حفاظت موتور است. این کلید با نام کلید حرارتی نیز عنوان می شود. کلید حرارتی وظیفه حفاظت موتور در برابر دو جریان حرارتی و جریان مغناطیسی را دارد.
جریان حرارتی
در شرایط اعمال بار اضافه به موتور، موتور جریان بیشتری می کشد و شروع به داغ شدن می کند. این جریان، جریان حرارتی نام دارد.
جریان مغناطیسی
در صورت بروز اتصال کوتاه بین دو فاز یا اتصال بدنه به فاز یا نول و یا اتصال فاز و نول، موتور داغ می کند. در این شرایط گفته می شود جریان مغناطیسی افزایش یافته است.

ویژگی های کلید محافظ موتوری
- قابلیت قطع و وصل زیر بار
- قابلیت تنظیم دقیق جریان در یک بازه
- دارای شستی قطع و وصل برای کنترل دستی
- دارای کلید تست برای تست سالم بودن کلید
تفاوت کلید حرارتی (محافظ موتوری) با بی متال
کلید محافظ موتوری یا همان کلید حرارتی، موتور را در برابر هر دو جریان حرارتی و مغناطیسی محافظت می کند. اما بی متال تنها امکان حفاظت موتور در برابر جریان حرارتی را دارد. کلید محافظ موتوری مستقیم سه فاز مدار قدرت را قطع می کند و الکتروموتور قطع می شود؛ این در حالی است که بی متال مدار فرمان را (از طریق پیچ های ۹۵-۹۶) قطع می کند.
